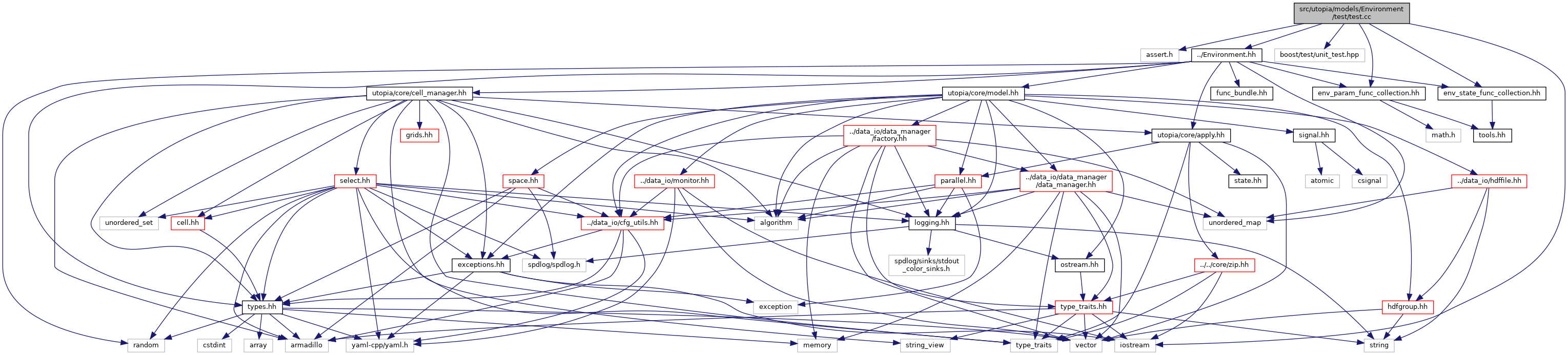
#include <assert.h>#include <iostream>#include <boost/test/unit_test.hpp>#include "../Environment.hh"#include "../env_param_func_collection.hh"#include "../env_state_func_collection.hh"
Include dependency graph for test.cc:
Classes | |
| struct | EnvParam |
| A non-abstract EnvParam, derived from the base class. More... | |
| struct | EnvCellState |
| A non-abstract EnvCellState, derived from the base class. More... | |
Functions | |
| template<typename T > | |
| void | assert_eq (T arg1, T arg2, const double epsilon=1e-12) |
| template<typename Model > | |
| void | test_add_env_func (Model &model) |
| int | main () |
Function Documentation
◆ assert_eq()
template<typename T >
| void assert_eq | ( | T | arg1, |
| T | arg2, | ||
| const double | epsilon = 1e-12 |
||
| ) |
◆ main()
| int main | ( | ) |
141{
142 try {
143 // Initialize the PseudoParent from config file path
145
146 // Initialize the main model instance and directly run it
147 // Use the constructed EnvParam and EnvCellState; Have the model in
148 // standalone mode.
151
152 // use the register function
155
156 // Use the push rule function
158
159 return 0;
160 }
162 std::cerr << e.what() << std::endl;
163 return 1;
164 }
165 catch (...) {
166 std::cerr << "Exception occurred!" << std::endl;
167 return 1;
168 }
169}
A class to use at the top level of the model hierarchy as a mock parent.
Definition model.hh:1017
◆ test_add_env_func()
20 {
21 using EnvStateFunc = typename Model::EnvStateFunc;
22 using EnvParamFunc = typename Model::EnvParamFunc;
23
24 // Add a custom lambda
26 "some_glob_parameter", {true, true, {}});
27
29
30 // Add with update mode
32 {true, true, {}});
33
34
35 // Add a custom lambda
41 }
42 );
43
48 };
49
50 // Add with update mode
52
53 // Add initial env func
55 // will not be invoked, but this still tests the interface
56
57 // Use getter
60
61 // use setter
64
65 // Iterate
66 model.iterate();
67}
BOOST_TEST(constrain_angle(+1.)==+1.)
Assert the basic working of the regularisation function for angles.