Agent Specialisation for synchronous update. More...
#include <agent.hh>
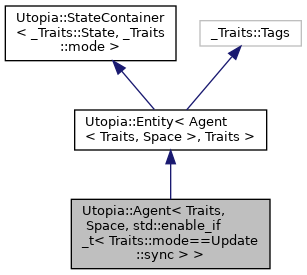
Inheritance diagram for Utopia::Agent< Traits, Space, std::enable_if_t< Traits::mode==Update::sync > >:
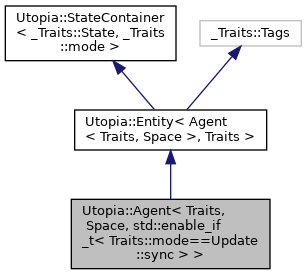
Collaboration diagram for Utopia::Agent< Traits, Space, std::enable_if_t< Traits::mode==Update::sync > >:
Public Types | |
| using | Self = Agent< Traits, Space > |
| The type of this agent. | |
| using | State = typename Traits::State |
| The type of the state. | |
| using | Position = typename Space::SpaceVec |
| The type of the position vector. | |
 Public Types inherited from Utopia::Entity< Agent< Traits, Space >, Traits > Public Types inherited from Utopia::Entity< Agent< Traits, Space >, Traits > | |
| using | Traits = Traits |
| The traits of this entity. | |
| using | Self = Entity< Agent< Traits, Space >, Traits > |
| The type of this entity. | |
| using | State = typename Traits::State |
| The type of the state of this entity. | |
| using | Tags = typename Traits::Tags |
| The tags associated with this entity. | |
| using | CustomLinkContainers = typename Traits::template CustomLinks< EntityContainer< Agent< Traits, Space > > > |
| A construct that has as members containers for custom-linked entities. | |
Public Member Functions | |
| Agent (const IndexType id, const State &initial_state, const Position &initial_pos) | |
| Construct an agent. | |
| const Position & | position () const |
| Return the current position of the agent. | |
| const Position & | position_new () const |
| Return the position buffer of the agent. | |
| void | update () |
| Update the position and the state. | |
| Public Member Functions inherited from Utopia::Entity< Agent< Traits, Space >, Traits > | |
| Entity (const IndexType id, const State initial_state) | |
| Construct an entity. | |
| const IndexType & | id () const |
| Return const reference to entity ID. | |
| CustomLinkContainers & | custom_links () |
| Return reference to custom link containers. | |
| const CustomLinkContainers & | custom_links () const |
| Return const reference to custom link containers. | |
Protected Member Functions | |
| void | set_pos (const Position &pos) |
| Set the position buffer of the (synchronously updated) agent. | |
Private Attributes | |
| Position | _pos |
| The current position of the agent. | |
| Position | _pos_new |
| The position buffer for the synchronous position update. | |
Friends | |
| template<class T , class M > | |
| class | AgentManager |
| Make the agent manager a (template) friend. | |
Additional Inherited Members | |
| Static Public Attributes inherited from Utopia::Entity< Agent< Traits, Space >, Traits > | |
| static constexpr Update | mode |
| Whether this entity is updated synchronously. | |
Detailed Description
template<typename Traits, typename Space>
class Utopia::Agent< Traits, Space, std::enable_if_t< Traits::mode==Update::sync > >
class Utopia::Agent< Traits, Space, std::enable_if_t< Traits::mode==Update::sync > >
Agent Specialisation for synchronous update.
Member Typedef Documentation
◆ Position
| using Utopia::Agent< Traits, Space, std::enable_if_t< Traits::mode==Update::sync > >::Position = typename Space::SpaceVec |
The type of the position vector.
◆ Self
| using Utopia::Agent< Traits, Space, std::enable_if_t< Traits::mode==Update::sync > >::Self = Agent<Traits, Space> |
The type of this agent.
◆ State
| using Utopia::Agent< Traits, Space, std::enable_if_t< Traits::mode==Update::sync > >::State = typename Traits::State |
The type of the state.
Constructor & Destructor Documentation
◆ Agent()
|
inline |
Construct an agent.
- Parameters
-
id The id of this agent, ideally unique initial_state The initial state initial_pos The initial position
152 :
156 {}
Position _pos
The current position of the agent.
Definition agent.hh:138
Position _pos_new
The position buffer for the synchronous position update.
Definition agent.hh:141
Container select_entities(const Manager &mngr, const DataIO::Config &sel_cfg)
Select entities according to parameters specified in a configuration.
Definition select.hh:213
Member Function Documentation
◆ position()
|
inline |
Return the current position of the agent.
◆ position_new()
|
inline |
Return the position buffer of the agent.
◆ set_pos()
|
inlineprotected |
Set the position buffer of the (synchronously updated) agent.
This function allows befriended classes to set the position of this agent.
- Note
- No check is carried out whether the new position is valid; this needs to happen in the construct that is aware of the space the agent resides in, i.e.: Utopia::AgentManager.
- Parameters
-
pos The new position of the agent
◆ update()
|
inline |
Update the position and the state.
Writes the buffer of state and position to the current state and position. This is necessary for the synchronous update mode only.
Friends And Related Symbol Documentation
◆ AgentManager
|
friend |
Make the agent manager a (template) friend.
Member Data Documentation
◆ _pos
|
private |
The current position of the agent.
◆ _pos_new
|
private |
The position buffer for the synchronous position update.
The documentation for this class was generated from the following file:
- include/utopia/core/agent.hh